

پشت موتور هر دستگاهی که قابلیت جابه جایی داشته باشد، یک انکودر کالسکه قرار دارد. عملکرد انکودر کالسکه در واقع مشابه با عملکرد انکودر افزایشی است با این تفاوت که دو عدد چرخ بر روی آن سوار شده است. این چرخ ها بر روی سطحی که حرکت میکند قرار میگیرند و با حرکت سطح، چرخها نیز میچرخند و حرکت را به انکودر منتقل میکنند. از هر انکودر کالسکه برای محاسبه تعداد دفعات چرخش موتور (چپ یا راست) استفاده میشود. این میتواند برای محاسبه مسافتی که دستگاه طی کرده یا چرخانده است استفاده شود.
هر انکودر کالسکه در واقع از دو قسمت تشکیل شده است:
1- یک سنسور Hall Effect که می تواند قدرت یک میدان مغناطیسی را اندازه گیری کند.
2- یک آهنربا حلقهای (شبیه واشر فلزی) که به شفت موتور متصل شده است.
وقتی موتور چرخ را بچرخاند، آهنربا حلقه را نیز میچرخاند. سنسور Hall Effect که در نزدیکی حلقه قرار دارد، با چرخش حلقه، تغییرات میدان مغناطیسی را تشخیص میدهد. به این ترتیب سنسور میتواند چند بار چرخش موتور را بشمارد.

انکودر کالسکه










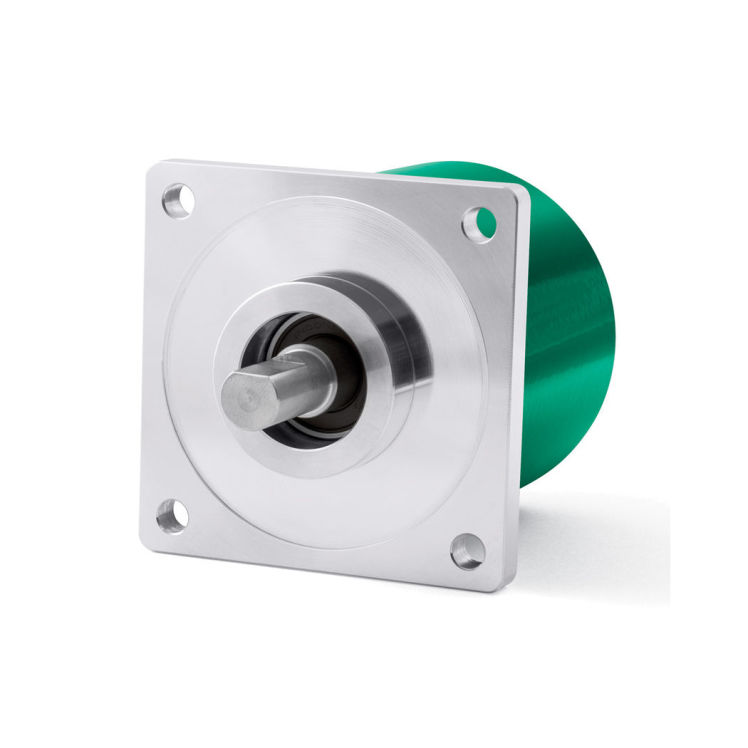

چرخهای اندازهگیری انکودر کالسکه روشی کارآمد و قابل اعتماد برای انکودرهای دورانی برای اندازه گیری طول و فاصله خطی است. این نوع از انکودرها انعطافپذیری بالایی دارند و به راحتی روی سطح قرار میگیرند تا اندازهگیریهای دقیق را انجام دهند.
چرخ های اندازهگیری انکودر کالسکه چگونه کار می کنند؟
انکودر کالسکه از یک چرخ برای ردیابی حرکات خطی استفاده میکند. آنها این دادهها را به مقادیر سرعت یا موقعیت تبدیل میکنند. یک فنر یکپارچه با اعمال فشار بر سطح، امکان اندازهگیری بدون لغزش را فراهم میکند. این دقت باعث میشود که آنها متناسب با انواع سطوح و کاربردها مانند تسمههای نقاله و غلتکهای حمل و نقل مناسب باشند.
انتخاب چرخهای اندازه گیری مناسب
هنگام انتخاب چرخهای اندازه گیری مناسب انکودر، دو ملاحظه مهم وجود دارد که دقت در اندازهگیری را تحت تأثیر قرار میدهد. اینها دور و عرض چرخ اندازهگیری و ماده چرخ است که کشش را تعیین می کند. هرچه چرخ اندازهگیری کوچکتر باشد، نیروی بیشتری در دور چرخ مورد نیاز است. به طور کل، اندازه چرخهای اندازهگیری انکودر انتخابی به اندازه انکودر و فضای موجود بستگی دارد.
کاربرد انکودر کالسکه
اندازهگیری موقعیت در:
- تسمههای نقاله
- غلتکهای حمل و نقل
- حرکت خطی در قطعات ماشین

اطلاعات تماس
+98 (21) 366 17 329 | +98 (903) 259 91 20
info@globaltech.net.tr | sales@globaltech.net.tr
تمام حقوق مادی و معنوی این سایت متعلق به انکودر شاپ می باشد.




ما را در شبکههای اجتماعی دنبال کنید
سبد خرید