

انکودر مطلق دستگاههای بازخوردی (feedback) هستند که با تولید یک کلمه یا بیت دیجیتال در رابطه با حرکت، اطلاعات مربوط به سرعت و موقعیت را فراهم میکنند. برخلاف انکودرهای افزایشی که جریان پیوستهای از همه نوع پالس را تولید میکنند ، انکودرهای مطلق کلمات یا بیتهای منحصر به فردی را برای هر موقعیت تولید میکنند.
انواع انکودر مطلق
انکودرهای مطلق را میتوان بر اساس نوع فناوری سنجش (نوری یا مغناطیسی) یا خروجی آنها از چندین چرخش شقت موتور (تک دور یا چند دور) دستهبندی کرد. انکودرهای مطلق نوری از یک دیسک کد ا و یک LED استفاده میکنند که نور را از طریق دیسک کد میتاباند. همانطور که دیسک با شفت موتور میچرخد، تغییرات موقعیتها قابل تشخیص است. برای انکودرهای مطلق مغناطیسی، نشانگرهای نوری با قطبهای مغناطیسی و LED با یک آرایه سنجش مغناطیسی جایگزین میشوند.

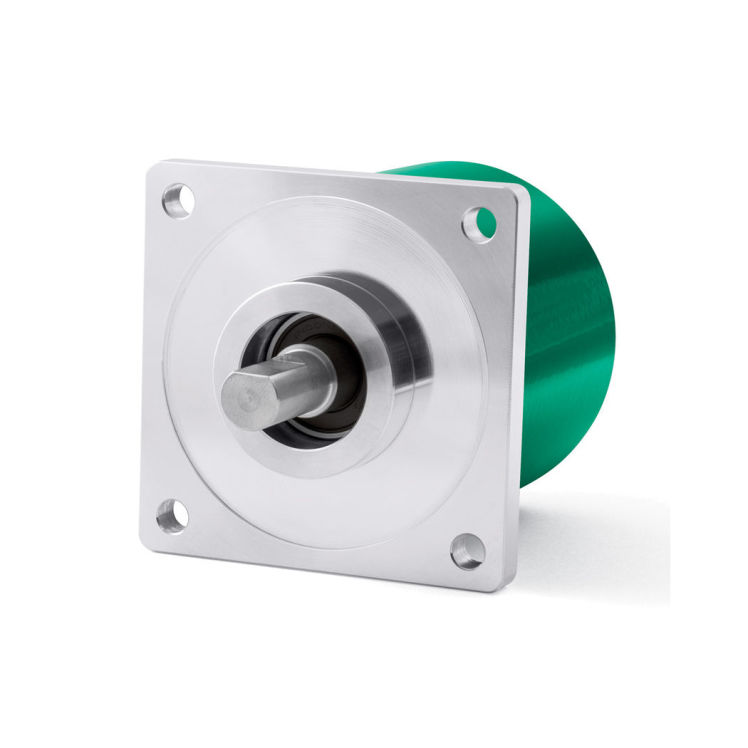
انکودر مطلق











مزیتهای انکودر مطلق
با خروجی یک کلمه یا بیت دیجیتال به جای جریان پالس ، انکودرهای دورانی مطلق چندین مزیت را ارائه میدهند:
وضوح کلی بالاتر در برابر انکودرهای افزایشی
عملکرد راهاندازی بهتر به دلیل کم بودن زمان Homing (یا موقعیت اولیه)
تشخیص دقیق حرکت در طول چندین محور
پروتکلهای خروجی چندگانه برای ادغام بهتر الکترونیک
بازیابی بهتر از خرابی سیستم یا برق

در حالی که همه انکودرهای دورانی مطلق بازخورد را بر اساس چرخش شفت (موقعیت انکودر در 360 درجه یا یک دور) ارائه میدهند ، اما برنامه ها براساس نیاز به دانستن اینکه انکودر چند بار چرخش کامل یا چندین چرخش انجام داده است، متفاوت است. انکودرهای مطلق چند دور، بازخورد بیشتری برای تعداد چرخشهای 360 درجه ارائه میدهند.
نحوه عملکرد انکودر مطلق
انکودر دورانی مطلق موقعیت خود را با استفاده از یک نقطه مرجع استاتیک تعیین میکند. این روش بسته به نوری یا مغناطیسی بودن انکودر دورانی مطلق کمی متفاوت است، اما اصل عملکرد هر دو نوع به صورت یکسان است.
انکودر مطلق با چرخش شفت با تولید یک کلمه بیت دیجیتال کار میکند. در این انکودر دو دیسک وجود دارد، هر دو دارای حلقههای متحدالمرکز با نشانگرهای افست هستند. یک دیسک به شفت مرکزی ثابت میشود و دیگری آزادانه حرکت میکند. با چرخش دیسک، نشانگرهای موجود در مسیر انکودرهای مطلق، موقعیت خود را بر روی دیسک ثابت تغییر میدهند. هر پیکربندی در امتداد دیسک یک انکودر دورانی مطلق، یک کد باینری منحصر به فرد را نشان میدهد. نگاهی به کد باینری در انکودر دورانی مطلق، موقعیت مطلق جسم را تعیین میکند. برای انکودرهای مطلق نوری، نشانگر یک روزنه است که نور را عبور میدهد. برای انکودرهای مطلق مغناطیسی، نشانگرها یک آرایه سنسور مغناطیسی هستند که از روی آهنربا عبور کرده و موقعیت قطبهای مغناطیسی را تشخیص میدهند.
اطلاعات تماس
+98 (21) 366 17 329 | +98 (903) 259 91 20
info@globaltech.net.tr | sales@globaltech.net.tr
تمام حقوق مادی و معنوی این سایت متعلق به انکودر شاپ می باشد.




ما را در شبکههای اجتماعی دنبال کنید
سبد خرید